

The oil and gas industry has moved into more extreme territories in recent years, sanctioning an increasing number of ultradeepwater projects that require the use of remote and long-distance subsea tiebacks as well as subsea processing systems.
With the push to deepwater development, production has become more reliant on the integrity of subsea, umbilical, riser, and flowline (SURF) systems. Operators have been seeking more cost-effective ways to define and implement the inspection and monitoring methods needed to assess and manage the integrity of SURF systems.
In August 2012, Wood Group Kenny, with the help of the Industry Technology Facilitator (ITF), launched an operator-only joint industry project (JIP) to help enable an integrated approach to the integrity management of SURF systems and develop best practices. The ITF comprises members of international oil and gas operating and service companies collaborating in the funding of research and development to address shared technology challenges
The JIP had 12 participating operators: BG, BHP Billiton, BP, Chevron, Hess, Maersk Oil, Petrobras, Petronas, Shell, Suncor, Total, and Woodside. These companies met twice annually for 2–3 days at a time, sharing their experiences in handling subsea integrity and reliability issues. The project had four primary objectives:
- Review the current practices and gaps for the integrity management of subsea systems
- Identify key failure mechanisms of SURF systems
- Propose best practices for subsea integrity management
- Identify technology gaps by surveying existing and emerging inspection and monitoring techniques and compare them to integrity management needs
As part of the JIP, the companies also developed best practice guidelines for integrity management.
In December 2012, after the final JIP meeting, the companies formed the SURF IM Network—IM stands for integrity management—to continue sharing lessons and focus on the key issues and challenges facing subsea integrity management. Phase I of the network ran from 2014 to 2015 and had 14 participating companies: Anadarko, E.ON, ExxonMobil, Husky Energy, and Tullow Oil joined the original JIP members BG, BP, Chevron, Hess, Maersk Oil, Petronas, Shell, Total, and Woodside.
In July 2015, the companies decided to re-engage for 3 additional years. Phase II of the network will run until 2018 on an expected project value of approximately USD 468,000.
Kieran Kavanagh, technology development director at Wood Group Kenny, said the SURF IM Network has been successful at continuing the dialogue between operators as they seek technological and methodological solutions to the problems that arise in managing subsea systems.
“What I think we’ve achieved with SURF IM is providing a forum through which participants can share field experience in the development of various technologies and compare experiences in their effectiveness,” Kavanagh said.
Standardizing Integrity Management
In launching the SURF IM Network, Wood Group Kenny and its other participating operators are hoping to create a standardized approach to subsea integrity management.
Kavanagh said this is important for the industry because there are substantial gains to be achieved from the risk-based inspection and reliability-based maintenance of subsea equipment. Taken together, he said those two activities will provide an opportunity for significant economies over periodic inspections or maintenance activities while also providing greater safety through an increased focus on the higher-risk elements of a subsea system.
“A standardized approach to these allows best industry practice to be developed in consultation with a large group of operators from small to large, including both international and national oil companies,” Kavanagh said. “Sharing operator experience to achieve this will improve industry practice through collaboration in an area where operators do not compete and, indeed, share common goals like increased safety, reliability, and integrity.”
The identification and development of emerging subsea inspection technology is one way to help standardize integrity management. Kavanagh said subsea inspection technology lags behind similar equipment for topside and onshore systems primarily because of the cost and difficulty of working in a subsea environment.
“In a subsea environment, equipment needs to be marinized, ruggedized, and its successful deployment carefully planned and qualified, which is a more difficult and expensive process than it would be to achieve this in dry topside conditions. Similarly, the cost of failure of this monitoring or inspection equipment in subsea conditions is typically higher than the topsides because of the intervention costs for subsea, especially with deepwater projects,” Kavanagh said.
Though it is still an area of focus, Kavanagh said the industry has made noticeable efforts to improve subsea inspection equipment and that several promising technologies exist that offer more effective inspections and a lower cost for deployment.
Kavanagh cited autonomous underwater vehicles (AUV) as an example of such technology. Lockheed Martin presented its Marlin AUV inspection technology as part of the original JIP. It is 10 ft long, and comes equipped with advanced autonomy and high-resolution optical and acoustic sensors to generate 3D geo-referenced models of underwater platforms and the surrounding seabed.
In 2011, Lockheed Martin conducted the industry’s first unmanned offshore platform and site inspections in the US Gulf of Mexico using the Marlin, which logged more than 62 hours of submerged operations covering 72 miles of seabed (Boschee 2012). The AUV was released for commercial use in May 2013.
The JIP also cited Kongsberg's line of AUVs. The company currently has four AUV systems available for commercial use: the Hugin, Munin, Seaglider, and Remus.
Hugins are typically equipped with high-resolution synthetic aperture sonar (HiSAS) or side-scan sonar (SSS) systems, a multibeam echosounder (MBE), sub-bottom profilers (SBP), and cameras, plus a range of environmental sensors that operate concurrently. Munins have the capability of running SSS, MBE, SBP, and cameras at the same time. In addition, they have autonomous pipe-tracking software.
Unlike Hugins and Munins, which are both run by electronically driven propellers, the Seaglider uses wings and small changes in buoyancy to achieve forward motion. Navigation is accomplished by using a combination of GPS fixes while on the water surface and internal sensors that monitor the vehicle's heading and depth during dives. The Remus AUVs are built on a technology base that incorporates a vehicle interface program. This program helps with vehicle maintenance, mission planning, checkout, data analysis, and cross-vehicle training.
Corrosion Management
Heading into Phase I, the network operators had identified several technological gaps in corrosion management. One such gap is the monitoring of pipelines that cannot be internally inspected; for example, pipeline dead-legs that lack subsea pig launchers or receivers and are not part of a closed pigging loop (O’Brien 2012).
Kavanagh said progress has been made in studying this issue further when entering Phase II, but solutions for closing such gaps are still being developed.
“We have responded to this by making significant effort across the inspection industry in developing alternatives to inline inspection,” he said.
The operators also noticed uncertainties with internal corrosion and corrosion/erosion models, which benefit from accurate input data on temperature and fluid composition along a pipeline and from reliable validation data obtained, where possible, from inspection and wall thickness measurements.
“The uncertainties with corrosion models inevitably arise due to the limited availability and location of the measurements and validations, and from other limitations in the validation data behind analytical models,” Kavanagh said.
The JIP had previously recommended a study to baseline various corrosion models against volunteer corrosion monitoring and inspection results from members. Fig. 1 shows the baseline technology mapping the JIP originally configured for internal corrosion and erosion.
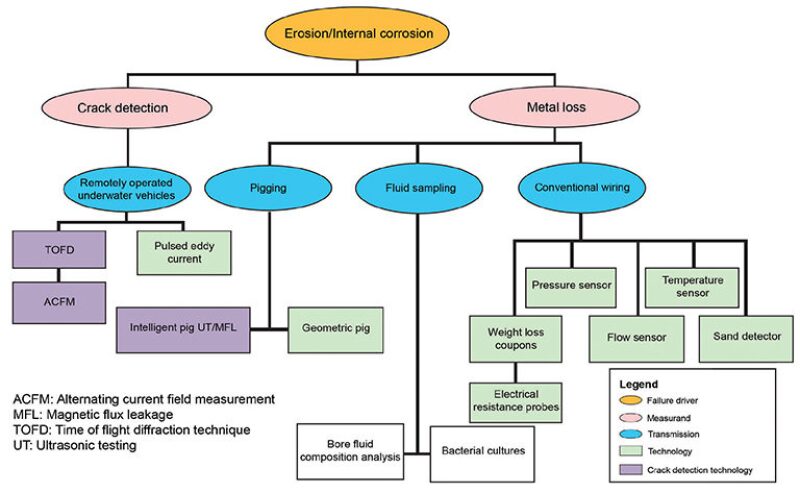
Three technologies were identified as effective real-time continuous corrosion monitoring technologies: ultrasonic phased array sensors, electrical field mapping techniques, and magnetostrictive sensor guided wave technology.
GE’s Rightrax wall thickness measuring tool was noted as an example of an effective ultrasonic phased array sensor. The system uses permanently installed ultrasonic sensors that permit the remote monitoring of high-temperature areas up to 350°C. Once fitted, it provides remote access to data, eliminating the need to erect scaffolding, remove insulation, or shut down plants.
The system provides additional inspection capability for pigging operations, especially for critical spots and nonpiggable sections. It also correlates process parameters such as flow, temperature, pressure, crude quality, and chemical injection to pipe wall thickness variation to help operators make optimal process decisions.
Another technology cited by the JIP, Sensorlink’s UltraMonit, is an ultrasonic erosion and corrosion monitoring tool that uses ultrasound transducers to provide wall thickness measurements at selected locations. It is based on the ultrasonic pulse-echo method, integrating with a subsea control system to give operators live wall thickness measurement data.
The tool consists of multiple ultrasound sensor modules spread around a pipeline, each containing several ultrasound transducers mounted together with a multiplexer card and a temperature sensor. The transducers are mounted in polyetheretherketone sensor housings that are fixed to the pipeline. A short ultrasound pulse is generated by the transducer, and echoes from different interfaces are recorded by the same transducer. Raw data can be transferred to the topside facility through the subsea control system.
Roxar’s CorrOcean monitoring system was listed as a notable electrical field mapping technique. The system induces an electrical current into strategically located pipe sections and monitors changes in the electrical field pattern, indicating any potential metal loss. It works at water depths of up to 10,000 ft, temperatures ranging from 14°F to 284°F, and has a sensitivity for detecting 0.1% change to pipe wall thickness for general corrosion.
Technologies for Other Problems
In addition to AUVs and corrosion management tools, the JIP identified several other technologies as potentially useful in other problem areas.
Paradigm Flow Services’ Pipe-Pulse was identified as a solution for pipeline blockage, another problem that affects subsea integrity. This technology sends pressure pulses into the pipeline or subsea umbilical, which are transmitted at the speed of sound to the blockage, even if it is more than 50 miles away, according to the company. The device’s remote operation differentiates it from other methods for blockage removal, such as the deployment of a coiled tubing system from a rig or the use of saturation divers.
The system is connected to the topside facilities of the host platform through either a pig launcher or an umbilical termination unit. It operates using a series of control valves contained within the main body of the device. Proprietary algorithms determine the optimal wave structure for each pulse, and the device then physically creates and injects the manufactured pulse into the pipeline.
During its test phases, Pipe-Pulse cleared a 4-in. multiphase flowline for Shell UK that had been blocked by sand and wax deposits for 11 years. It also removed a pig stuck in a deepwater 8-in. flowline for Petrobras.
Halfwave, a company jointly owned by Energy Ventures, Det Norske Veritas, and Chevron, developed its acoustic resonance technology (ART) for subsea and pipeline inspection. ART is an ultrawideband inspection technology in which a sending transducer transmits a broadband acoustic signal toward a metal structure. The signal spreads on the structure and transmits a characteristic response signal that the receiving transducer detects.
By analyzing the frequency of this response signal, operators can determine the resonance peak frequencies, from which the base resonance frequency and the structure’s thickness can be estimated.
To help deploy the technology on-site, Halfwave developed the ART External Measurement Inspection Subsea, a remotely operated vehicle (ROV) that can be launched from any vessel or installation. The ROV was designed to inspect rigid and flexible risers, flowlines, pipeline coating, and piping structures.
Biota Guard was identified by the SURF IM JIP as having developed an emerging sensor-based leak detection service. It runs on a battery-powered sensor station fitted with biosensors, optical sensors, and acoustic sensors as well as an oceanographic sensor package. The technology integrates with standard reporting tools such as email or weekly reports to provide alerts of potential leaks based on predefined parameters.
The detection service can be used on offshore and subsea installations and transmission lines. It is also a viable produced water monitor.
Widening the Scope
The initial scope of the SURF IM JIP was to identify failure modes for subsea equipment. Some of the participating companies wanted an additional focus placed on subsea boosting and injection equipment integrity, so that was added as an additional task during the JIP. The companies hoped to identify failure modes associated with these systems as well as the enabling technologies such as subsea controls, subsea power distribution, structural and mechanical designs, and flow assurance technologies.
Kavanagh said the JIP partners identified failure mechanisms associated with subsea boosting and injection systems, but like most of its other developments, the discussions on how to improve those mechanisms is ongoing.
The JIP also conducted a compilation of baseline inspection and monitoring technologies for comparison. This process involved the identification of technologies available to support baseline inspection and monitoring measures and the completion of a catalog with the technologies available to be deployed for the assessment of a specific defect or deterioration.
The classification of each technology was based on failure drivers: accidental damage, corrosion and erosion, electrical, fatigue, flow assurance, temperature, and pressure. The JIP partners facilitated the mapping of technologies to failure mode assessment and developed a systematic approach to ensure a comprehensive review.
Subsea piping equipment—jumpers, flowlines, and spools—were classified under accidental damage, with its primary failure modes being external damage, collapse, or rupture, and the failure mechanisms being deformation or overstress due to a localized impact. The primary initiators of failure for this equipment were dropped objects from a third party, anchors and mooring vessels, a dragged line, impact from an ROV, natural disaster, and activity from a trawl board or a fishing boat. The end result of this failure is a loss of hydrocarbon containment.
During Phase I, progress was made in understanding the issue of subsea control system (SCM) module reliability. Wood Group Kenny performed a survey of subsea control module failures and initiated discussions between the JIP participants and the vendor community to provide feedback on how those failures can be mitigated.
At a meeting in London in October 2014, the network members conduced an SCM reliability survey. In the survey, members reported that 32% of their SCM failures were due to problems with the analog interface. Hydraulic leaks accounted for 29% of reported failures and unknown electrical causes made up the remainder. The operators agreed to aim for improved SCM reliability for newbuilds, leveraging brownfield experience and lessons learned (O’Brien 2015).
The network members proposed further engagement with SCM vendors, initiating a dialogue where the two sides could set realistic goals in this area. The expectation is that vendors will take ownership and work with operators to evaluate the process of operating SCMs and propose opportunities for improvement.
One of the next steps is to propose the launch of an SCM reliability JIP. The ultimate goal for the SURF IM Network is to leverage its success into ongoing technological developments. Wood Group Kenny hopes to spawn additional JIPs on collaborative technology qualification and potentially develop a range of specific inspection and monitoring techniques to close technology gaps. Kavanagh said this discussion is still ongoing and the issue is still an area of focus for the network companies heading into Phase II.
Other main areas of discussion during Phase I included long-distance tiebacks, flexible flowline upheaval buckling, life extension of subsea structures, and enhanced asset integrity using artificial intelligence.
The information gathered during Phase I will be used to develop a systematic approach to mapping the failure modes and mechanisms of all subsea equipment, including Christmas trees and SURF and subsea control systems. These will be mapped onto a subsea integrity management system, taking the project life cycle from design and decommissioning into account. The network partners hope that this mapping will enable a more predictive and risk-based approach to integrity management.
The next meeting of network members is scheduled for the week of 6–10 June in London.
For Further Reading
Boschee, P. 2012. Offshore Integrity Management Advances With New Technologies. Oil and Gas Fac 1 (4): 16–20.
O’Brien, P. 2012. Update on SURF IM Joint Industry Project, http://www.subseauk.com/documents/presentations/surf%20im%20presentation%20-%20pob%20-%20for%20issue%20dec%202012.pdf (accessed 3 December 2015).
O’Brien, P. 2015. Collaborative Mechanisms and Activities to Progress Industry Required Technology Development, http://mcedd.com/wp-content/uploads/2014/04/Obrien-POB-ITF-Presentation-March-26th.pdf (accessed 9 December 2015).
OTC 23512 Autonomous Inspection of Subsea Facilities—Gulf of Mexico Trials by D. Mcleod, J.R. Jacobson, and S. Tangirala, Lockheed Martin Mission Systems & Sensors.