
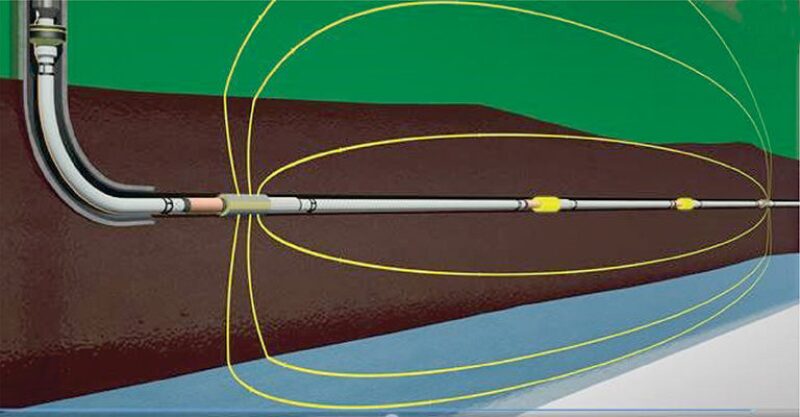
In this paper, the authors introduce a new technology installed permanently on the well completion and addressed to real-time reservoir fluid mapping through time-lapse electromagnetic tomography during production or injection. The variations of the electromagnetic fields caused by changes of the fluid distribution are measured in a wide range of distances from the well. The data are processed and interpreted through an integrated software platform that combines 3D and 4D geophysical data inversion with a machine-learning (ML) platform. The complete paper clarifies the details of the ML work flow applied to electrical resistivity tomography (ERT) models using an example based on synthetic data.
Introduction
An important question in well completions is how one may acquire data with sufficient accuracy for detecting the movements of the fluids in a wide range of distances in the space around the production well.